资源下载
资源下载

HMMWV
文件列表(压缩包大小 14.24M)
免费
概述
在KIT学习期间,我与负责该软件的朋友Maximilian Hess共同构建了这个项目。可以在GuitHub上找到更多信息。
HMMWV是一款中型机器人,旨在执行以下任务:
遥控驾驶
自动导航
找到并爬上台阶和楼梯
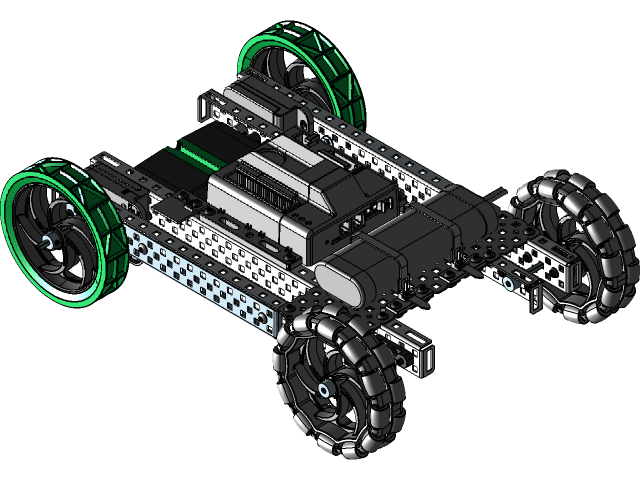
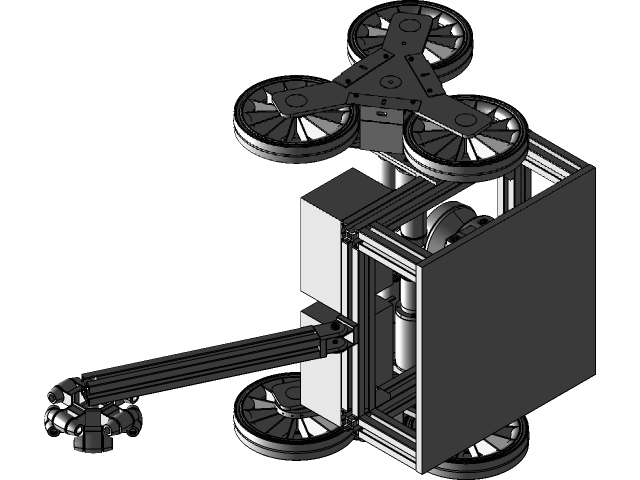
为了准备该任务,它具有一个由铝型材制成的坚固底盘和两个带有三个独立车轮的坚固的y形车轮安装架,每个车轮可以通过两个高扭矩EC maxon电动机单独倾斜。
安装座上的车轮通过两侧的链条驱动器连接,该链条驱动器由60 W电机提供动力。为防止机器人翻倒,它的尾巴上有一个全向轮,可以在上下楼梯或其他障碍物时稳定机器人。
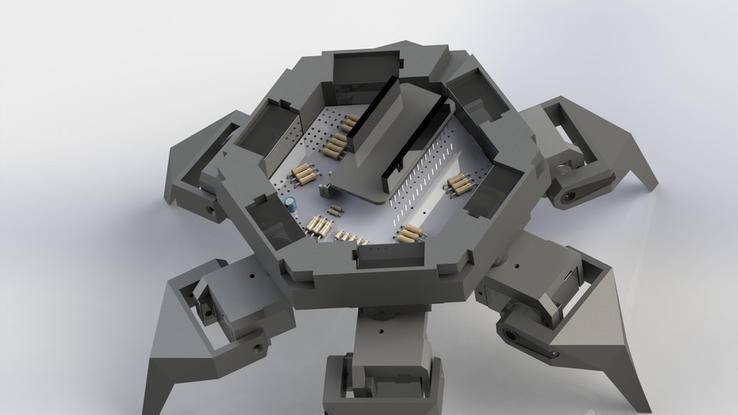
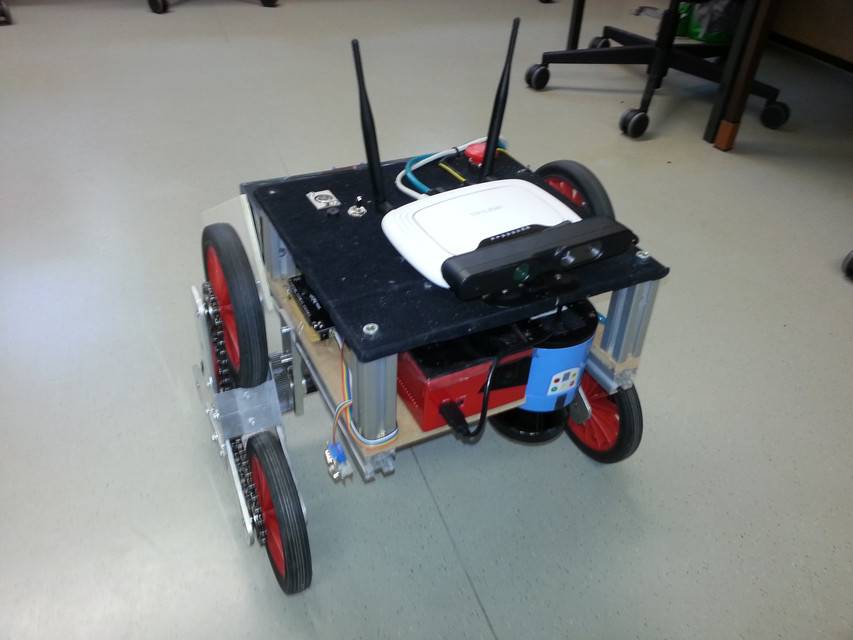
对于定位和寻路,HMMWV具有Sick的激光雷达系统(LMS 100),该系统将二维激光扫描发送到主处理单元。
HMMWV使用技嘉(Gigabyte)的小型x86计算机作为其主计算机。由于环境的二维横截面不足以在三维空间中获得方向,因此我们将传感器放置在缓慢旋转的平台上,这使我们有机会计算出机器人周围环境的三维图像区域。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250