资源下载
资源下载

室内视觉定位及导航_本科毕业设计&答辩PPT

文件列表(压缩包大小 16.00M)
免费
概述
摘要
由于现有定位技术在室内的局限性, 室内实时高精度定位和导航一直是人们 (尤其是盲人)生活中一项难以攻克的技术难关。视觉定位能够直接利用图像传感器,模仿人眼的视觉定位,定位精度相较于其他定位技术精度高许多。二维图像由于只有平面图像信息,无法获得现实世界的深度信息,用于视觉定位有较大缺陷。 随着 RGB-D 相机(深度相机)近年来的迅速发展,基于三维图像的定位算法也不断被提出,能够应用于室内高精度定位。
本文首先对图像特征点选取算法进行了介绍,并根据测试代码比较了 SURF 特 征和 ORB 特征的稳定性和运行速度,由于 ORB 特征拥有较高的稳定性和较高的速度,选择了 ORB 特征作为视觉定位的特征。使用开源库 librealsense、OpenCV 和 ORB-SLAM2 作为代码总框架,实现三维地图的重建和地图实时重定位以及导航。
最后从平移和旋转两个方面测试了视觉定位的精度,证实了本系统能够用于室内高精度定位。并测试帧率,验证本系统用于实时定位和导航的可靠性。
目录
1.引言 1.1 研究背景及意义 1.2 国内外研究现状 1.3 主要研究内容
2.RGBD 相机模型及数据获取 2.1 RealSense R200 介绍 2.2 相机内参与畸变 2.3 相机外参 2.4 深度图与 RGB图像的配准
3.主要算法 3.1 ORB特征与 SURF、SIFT特征 3.2 ICP 算法求解位姿
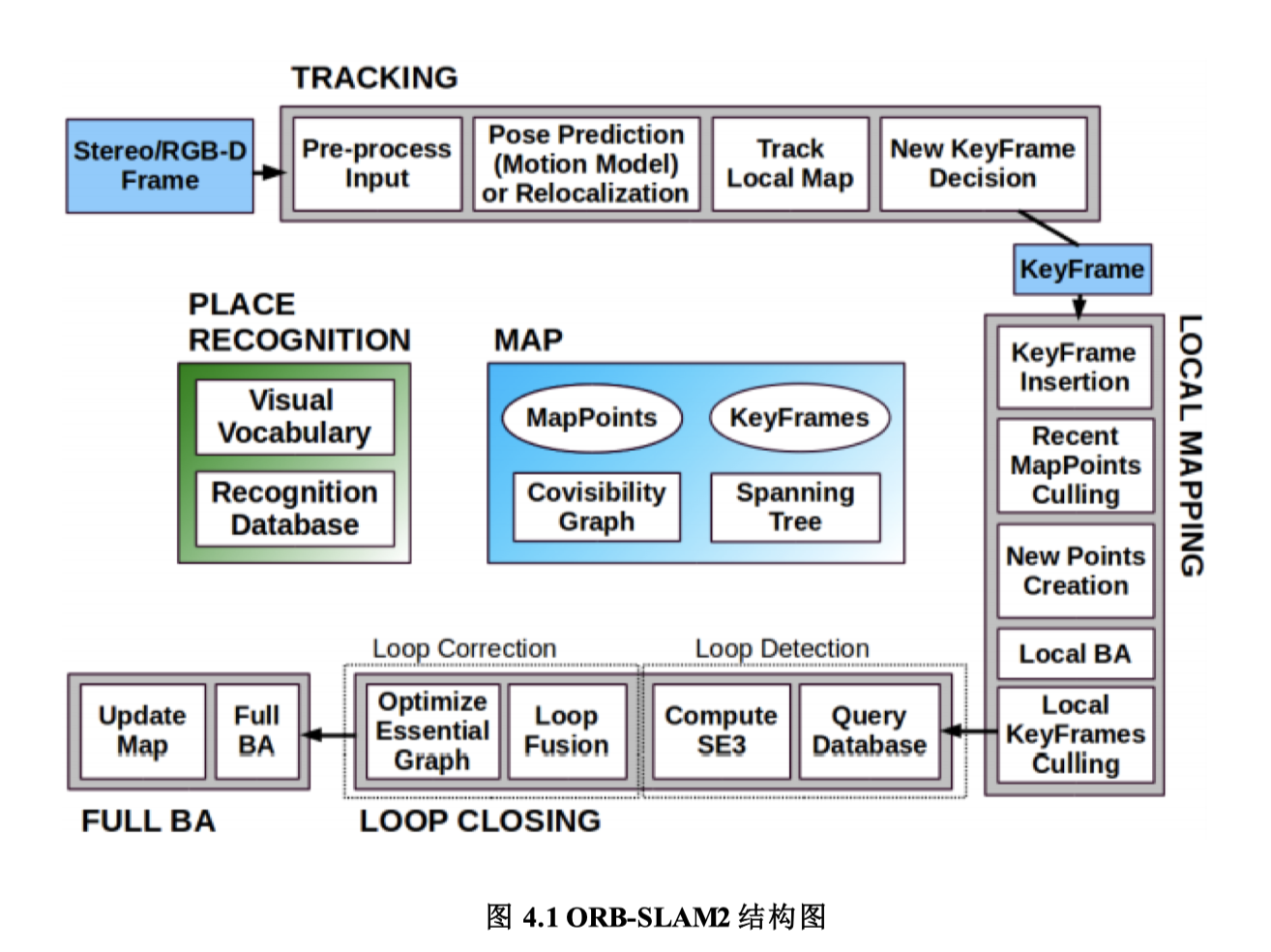
4.ORBSLAM2 详解 4.1 地图构建 4.2 跟踪(Tracking)模块 4.3 局部建图
5.linux 下版本库的比较与配置 5.1 OpenCV 配置 5.2 librealsense 配置 5.3 ORB-SLAM2 的修改与安装
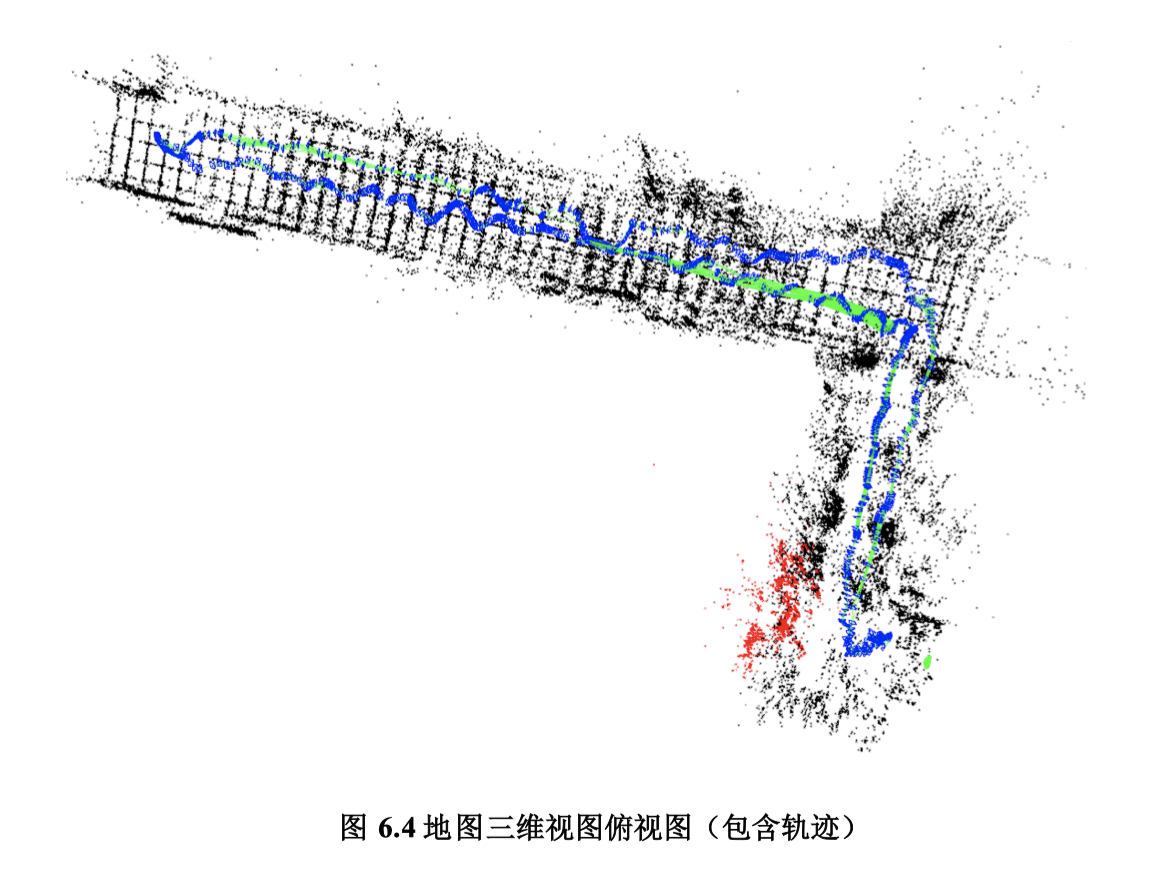
6.数据及结果 6.1 三维地图构建 6.2 二维导航地图 6.3 精度测试与速度测试
7.结论与展望 7.1 毕业设计总结 7.2 工作展望 参考文献 附件
声明:本资源为本科生毕业论文&答辩PPT,转载自浙江大学汪凯巍老师课题组:http://wangkaiwei.org/index.html
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250