 资源下载
资源下载



[课程设计]小车快速精确定位设计与实现
原创 
文件列表(压缩包大小 669.52K)
10理工币
概述
一、实验室名称: 电子技术综合实验室 二、实验项目名称:小车快速精确定位设计与实现 三、实验学时: 60 四、实验目的与任务: 1、熟悉系统设计与实现原理 2、掌握KEIL C51的基本使用方法 3、熟悉智能小车实验平台应用 4、独立编程调试,测试和掌握各部分的功能 5、完成系统软件的编写与调试 6、完成设计报告 五、实验器材 1、PC机一台 2、智能小车实验平台一套 六、实验原理、步骤及内容 (一)试验要求 基本要求:80分 (1)程序运行后,在8位数码管的高2位显示自己的学号;低3位显示当前温度,作为后期温度补偿的参数; (2)设置一个按键,当按下该按键时,蜂鸣器响0.1秒(按键提示音),清除数码管显示,启动小车前进(速度可自行设定档位),在数码管后三位显示“秒表计时器”作为小车运行时间,“秒表计时器”(定时中断实现),显示从“00.0”开始,最大显示到“99.9” ; (3)小车行驶过程中,在前三位数码管上显示在距离障碍物的测距结果,精度为0.1厘米。 (4)设定小车距离目标位置12.5cm处停止前行,通过速度调节和前进后退等方式使小车精确定位在目标位置,若小于目标距离,则声光报警,即用一个发光二极管指示灯LED2闪烁(亮0.1s、灭0.9s);蜂鸣器用500Hz方波驱动声响;若大于等于目标距离,则撤销声光报警。 扩展要求:20分(二选一) (1)利用温度补偿方式提升超声波测距的测量精度。 (2)利用数据拟合方式提升超声波测距的测量精度。
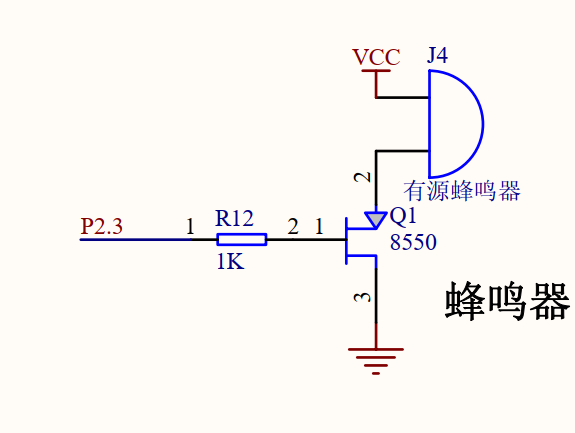
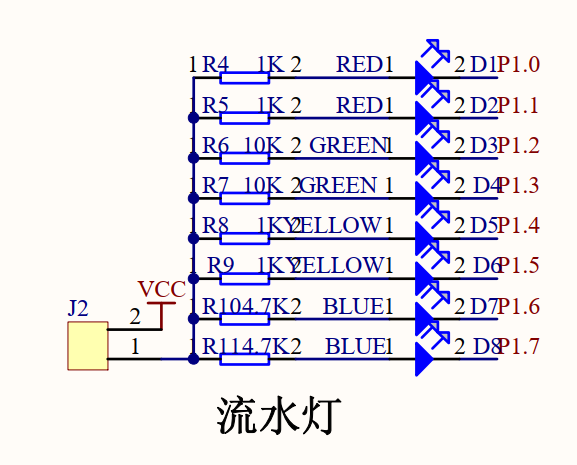
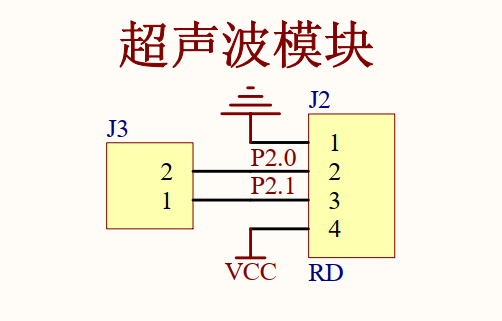
(二)实验内容 1、硬件设计 本次智能小车的主要51开发板,结合拥有电机驱动以及超声波模块的小车模型,组成智能小车。主要用到的硬件有,51单片机开发板,开发板自带的八位数码管,按键,led灯,蜂鸣器,小车模型自带的超声波模块,电机驱动模块,总体的硬件框架如图所示。其中数码管用来显示秒表以及测距的距离,超声波模块用来测距,蜂鸣器和灯起到声光提示作用,按键起到启动小车的作用。当按下按键后,启动小车,同时开启超声波模块功能进行测距,数码管显示距离和启动的时间,蜂鸣器和灯在软件控制下启动。 总体硬件框架图如下。
图1 系统硬件构成框图

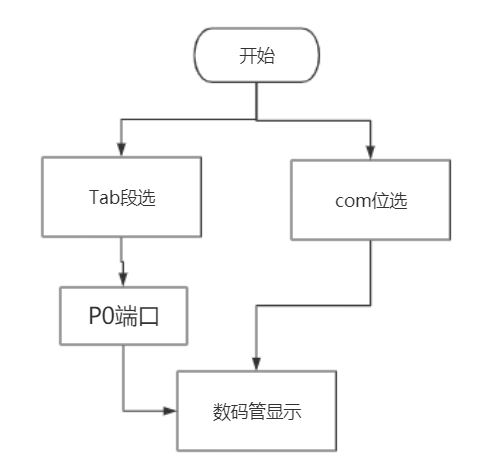
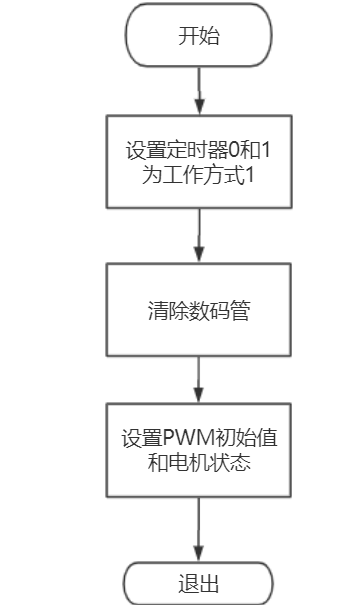
3、软件设计 本智能小车实验的功能由实验要求可知。在运行程序后,首先显示自己的学号,按下按键后,小车启动并测距,并在合适的位置停止,过程中有蜂鸣器和灯作为辅助。 由于需要运行多个任务,包括数码管显示,超声波的测距,电机的驱动等,所以在实现多任务的时候,使用了单片机提供的定时器0和定时器1的中断来实现多个功能。 本次软件的模块主要分为系统初始化模块,数码管显示模块,超声波测距模块,PWM控制电机驱动模块,延时模块。
七、总结及心得体会 本次的智能小车能实现基本功能: (1)程序运行后,高2位显示学号后两位; (2)2s后,清除数码管,高3位数码管上实时显示距离障碍物的测距结果,精度为0.1厘米。当按下该按键时,蜂鸣器响0.1秒(按键提示音),清除数码管显示,按下该按键并启动小车前进,在数码管低三位显示“秒表计时器”作为小车运行计时时间,以00.0-99.9循环计时。 (3)小车行驶过程中,在低3位数码管上实时显示距离障碍物的测距结果,精度为0.1厘米。 (4)当13.5cm>距离>120时,左右电机关闭,定位成功;当距离<12.0cm,声光报警,小车后退直到定位成功;当目标距离>13.5cm,小车前进,则撤销声光报警。 经过几天的学习与探究,运用keil软件编译并通过串口调试,发现实践和理论之间还存在着很多差距,实践出真知。在运行自己程序时,发现自身设计的小车快速精确定位还存在很多问题,比如:数码管和驱动无法并行运行,测距不准等问题,但经过不断地观察和调试,最终解决了这些问题。 通过本次实践,我们不仅学到了很多知识,包括定时中断,电机驱动,PWM的使用,也得到了很好的锻炼。一方面是整个系统设计的方法,统筹兼顾的考虑各个模块的实现,而且更重要的不管做什么事,当遇到问题时,一定要保持清醒的头脑。另一方面,认真观察,关键时刻可以运用调试软件方法,去寻找错误,很多时候代码语言正确是不会报错的,但是调试到小车上面确实出现不了预期的效果,问题出现在逻辑上面,自己的逻辑和计算机系统理解的逻辑有所出入,因而会出现不一样的效果。遇到这种情况,我们要仔细分析,努力寻找解决问题的方案。 除此之外,我们要更加注重细节,我们做设计时要考虑的各方面,实现方案的相关因素,包括理论论证、具体的分块功能测试、硬件是否易购买及价格等等都需要考虑,最终选择较优的方案。同时我们也认识到了细节的重要性,不论是在硬件的焊制中,还是软件的调试中,都可能“牵一发而动全身”,影响到其他部分,所以我们很注重细节的处理。
八、对本实验过程及方法、手段的改进建议 虽然完成了智能小车定位等功能,但没有对超声波测出的距离进行更高精度的设计,希望在后面有时间的话对测出的距离利用数据拟合方式提升超声波测距的测量精度。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250
10 理工币 理工币是什么?如何获取
·圈子
位酷友已加入

圈子: 电子毕业设计
标签:
毕业设计电路方案电子毕业设计
文件编号:980
上传时间:2021-02-21
文件大小:669.52K

推荐资源



推荐问题
加入组织

微信扫码,每周推送最新资料