资源下载
资源下载



拖
文件列表(压缩包大小 72.54M)
免费
概述
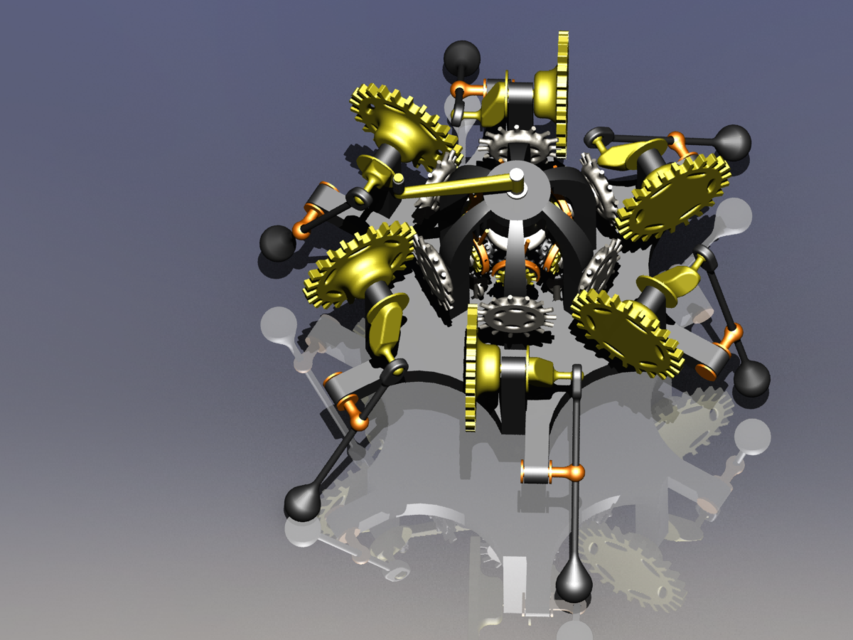
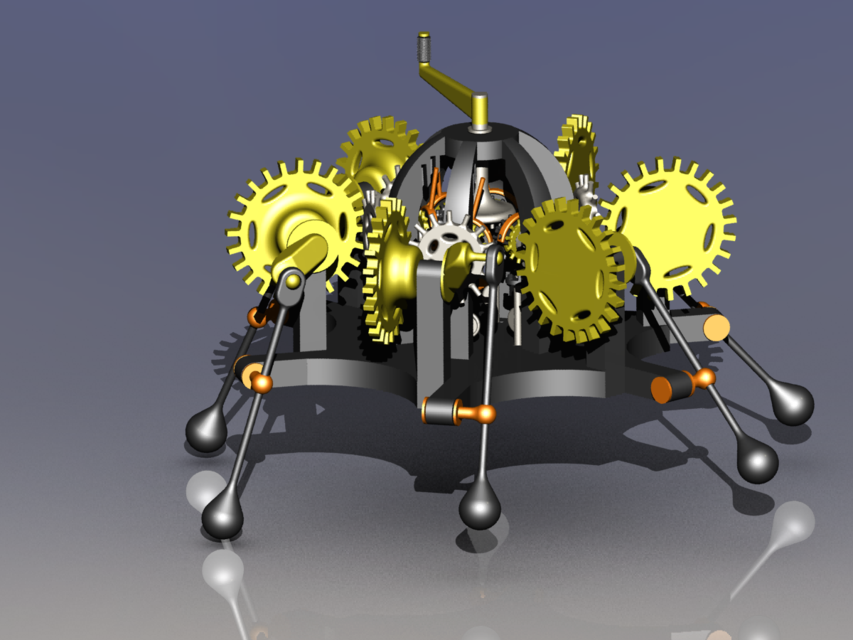
这项工作与六足机器人有关,该机器人可以顺时针/逆时针旋转每条腿,因此可以通过选择不同的腿来推动/拉动,从而在各个方向上行走。
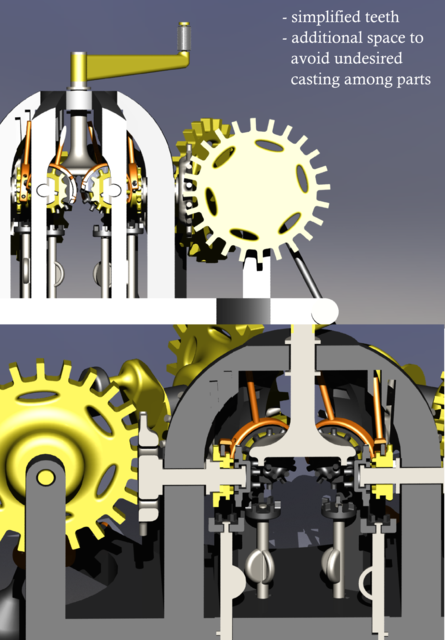
它被设计为由高精度Stratasys打印机进行3D打印,其垂直步距约为0.15毫米:齿轮和接缝得到了简化,并具有足够的空间,以避免在打印过程中出现不必要的铸件。
该设计展示了棱柱形,圆柱形和球形接头以及齿轮系统,这些齿轮系统将展示3D打印在创建自组装功能机制方面的巨大潜力。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250