资源下载
资源下载

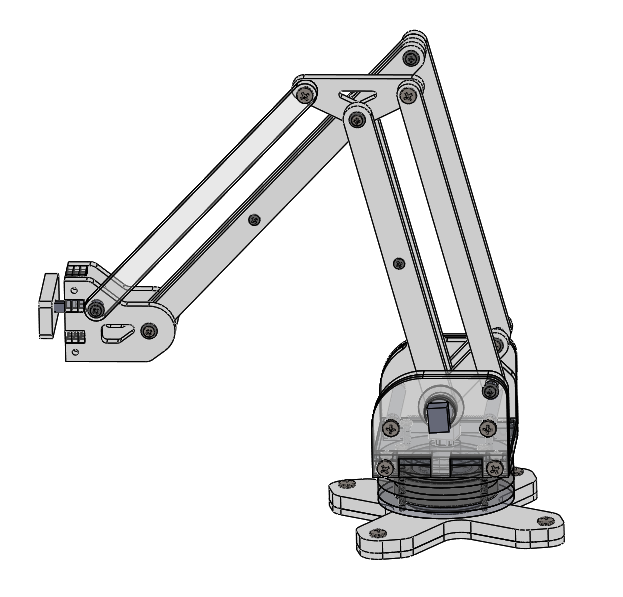

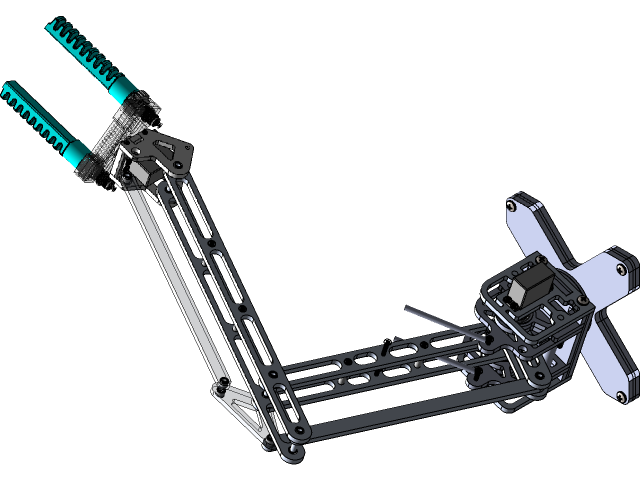
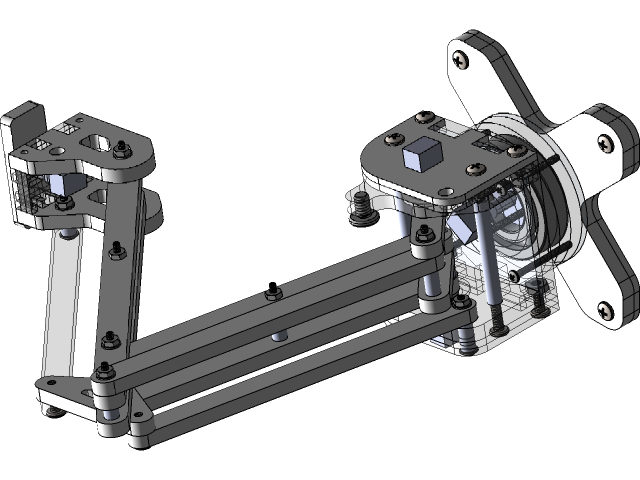
海上航行:可扩展的深海机器人手臂
文件列表(压缩包大小 50.99M)
免费
概述
该项目包括针对深海应用的四自由度机器人操纵器平台的设计,建模,制造,测试和发布。当前的深海操纵解决方案价格昂贵或功能受限,使其难以使用,不适合使用小型工作级研究ROV的学术研究人员使用。该项目的目标是开发一种易于扩展且可修改的操纵器,该操纵器由操作员直观地控制,以实现与深海环境的灵活交互。在该项目的范围内,该机械手专为在DeepReef海洋研究飞行器上进行低有效载荷和浅深度操作而设计。该操纵器结合了由哈佛微型机器人实验室开发的软机器人末端执行器,用于精细的操纵和采样。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250