计算平台是计算机系统硬件与软件的设计和开发的基础。 其具有一定的标准性和公开性,同时也决定了该计算机系统的硬件与软件的性能。 硬件的基础是中央处理器( CPU ), 软件的基础是操作系统。 自动驾驶任务的复杂性,意味着开发人员需要兼顾软件和硬件的协同。 当传感器接收信息后,数据继而被导入计算平台,由功能各异的芯片进行处理。 因此,计算平台的选择会直接影响到自动驾驶系统的实时性和鲁棒性。工程师需要衡量的指 标包括计算平台的性能、功耗和功能安全。 为了保证自动驾驶的实时性,软件响应的最大延 迟必须在可接受范围内,对计算资源的要求相应也变得极高。
自动驾驶系统的计算量随着传感器数据量和精度的提升而剧增,这使得开发者不得不重新思考对应的计算架构。 众多企业提出了很多解决方案,但由于自动驾驶系统对于安全性、实时性等方面的要求,能被行业普遍接受的主要有以下几种。
1. 基于计算平台方案
GPU的计算平台 ( 图形处理器)的多核心、高内存带宽等设计优点,意味着它在并行计算、浮点运算 时的性能是 CPU 的数十倍甚至上百倍。 特别是当人工智能在自动驾驶领域广为应用后, 使用 GPU 运行深度学习模型,在本地或云端对目标物体进行切割、分类和检测,不仅花费 的时间大幅缩减,也无须更多的数据处理设备支持,可以实现比 CPU 更高的应用处理效 率。 所以,凭借强大的计算能力以及对深度学习应用的有力支持, GPU 正逐渐成为自动驾 驶技术开发的主流平台解决方案。
以 GPU 起家的 NVIDIA 公司,在 2016 年至 2018 年陆续发布了一系列针对深度学习的芯片,例如 2016 GTC 开发者大会上发布的TeslaP100,如下图所示:

以及后来推出的深度学习芯片 TeslaP4开发者大会上发布的 和 TeslaP40 。
2. 基于FPGA的计算平台
FPGA即现场可编程逻辑门阵列,是一种高性能、低功耗的可编程芯片,用户可以通过 烧录 FPGA 配置文件来自定义芯片内部的电路连接,以实现特定功能。 而且这种烧录是可 擦写的,用户完全可以根据产品需 求 进 行 任 意 化 功 能 配 置。 自 Xilinx 在 1984 年 创 造 出 FPGA 以来,这种可编程逻辑器件凭借性能、开发时间、成本、稳定性和长期维护方面的优 势,在通信、医疗、工控和安防等领域占有一席之地,在过去几年也有极高的应用增长率。 目 前业内 FPGA 供应商主要有 Xilinx 、 Altera ( 2015 年被英特尔公司收购) 、 Lattice 、 Actel 这 4家公司。
对比 GPU 和 CPU , FPGA 的主要优势在于硬件配置灵活、能耗低、性能高以及可编程 等,适合进行感知计算。 目前出现的针对编程的软件平台,进一步降低了开发人员的应用门槛,使 FPGA 在自动驾驶感知技术领域的应用更广。 以 2017 年 7 月上市的奥迪 A8 为例, 这款主打人工智能概念的车型搭载了量产版的 NAS 多域控制平台,其中由 Altera 提供的CycloneV SoC ( 如下图所示) 就是基于 FPGA 技术打造的视觉解决方案。
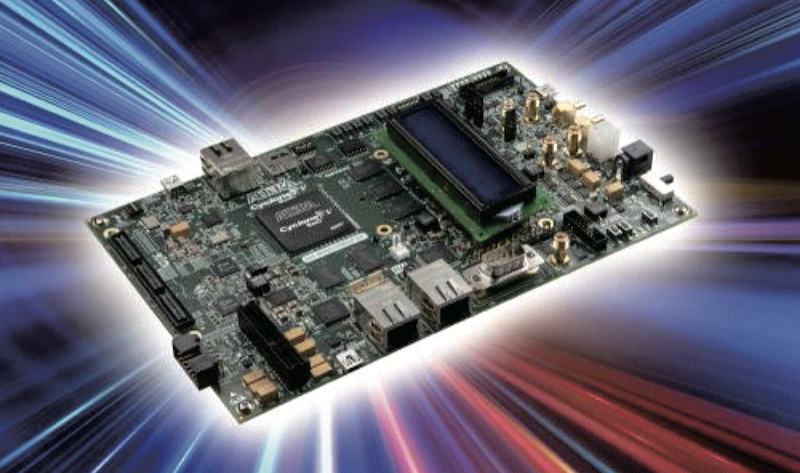
针对传感器融合应用做了优化,可以实时高效地完成对目标物体的检测。 不过 FPGA 产品本身迭代比较慢,四年才会产生新一代的产品,所以它无法满足自动 驾驶技术高速发展的需求。 此外,当开发者对门阵列和内存的需求比较大时, FPGA 的成本也会变得比较高。
3. 基于DSP的计算平台
DSP ( Di g italSi g nalProcessor ) 芯片,也称为数字信号处理器,是一种特别适合进行数 字信号处理运算的微处理器,其主要应用是实时快速地实现各种数字信号处理算法。 在其 设计方案中, DSP 的数据和地址总线分开,允许取出和执行指令完全重叠,执行上一条指令 的同时可取出下一条指令进行译码,大幅提升了微处理器的运行速度。 此外, DSP 的架构 设计特点使其在数学运算和数据处理方面有不错的表现,因此在时间关键型应用中, DSP 超过通用处理器的强大数据处理能力和高运行速度是其两大优势,这也奠定了它在自动驾 驶应用中的基础。
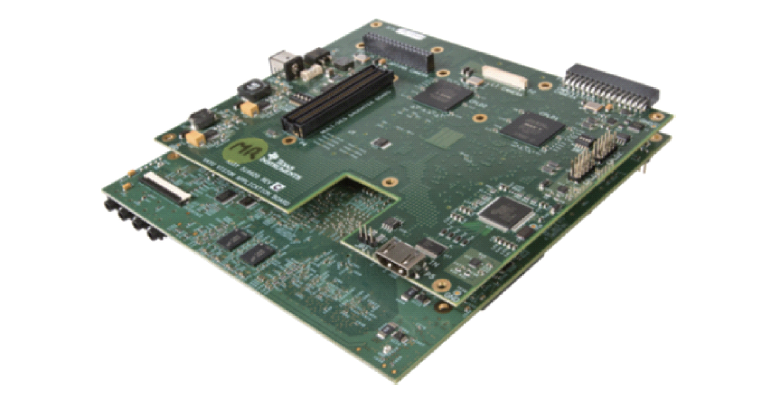
知名芯片供应商美国德州仪器公司( TexasInstruments , TI ) 是 DSP 解决方案的拥护 者。 它面向自动驾驶辅助系统( ADAS ) 及自动驾驶技术领域推出了 TDA2x 汽车系统级芯 片( S y stem onChi p , SoC ) 系列。 TDA2x 在低功耗封装中将高性能、视觉分析、视频、图形 以及通用处理内核进行结合,可实现包括前置摄像环绕视图以及传感器融合在内的 ADAS 应用。 此外,德州仪器开发的 VisionCelerationPac 还可补充 TMS320C66x 数字信号处理 器系列内核,让更多 ADAS 算法同步运行。 TITDA2x 还可作为融合雷达与摄像机传感器 数据的中央处理器,帮助做出更稳健的 ADAS 决策。
值得一提的是, DSPIP 平台授权厂商 CEVA 公司发布了第四代图像和计算机视觉处 理器 IP 产品 CEVA-XM4 。 这个新 IP 可以支持实时三维深度图生成和用于三维扫描的点 云( PointCloud ) 数据处理,单个 CEVA-XM4 内核可以完成典型的“目标检测与跟踪”用例, 功耗大约只有现今最先进 CPU 簇的 10% , 芯片面积只有现今最先进 CPU 簇的 5% 。
4. 基于 ASIC 的计算平台
ASIC 即专用集成电路,是为某种特定需求而专门定制的芯片。 一旦设计制造完成,内 部的电路和算法就固定了,无法再改变。 它的优势在于体积小、功耗低、计算性能和计算效率高,并且芯片出货量越大成本越低。 FPGA 和 ASIC 的区别,类似于用乐高积木搭建和去工厂开模定制生产的区别。 FPGA 上市速度快,一次性投入小,用户不需要介入芯片的布局布线和工艺问题,可以随时改变其 逻辑功能,但性能差一些,量产后成本降不下来; ASIC 芯片需要开模生产,流片成本很高, 设计固化后不可更改,研发费时,上市速度慢,前期投入很高,但是性能优越,一旦量产单片 成本就会很低。 半导体业界无数的实例表明, FPGA 往往是定制化 ASIC 的前哨站,一旦某 个应用的量足够大,定制化就会变得更经济。
目前比较知名的应用 ASIC 技术开发自动驾 驶相关芯片的厂商是 Mobile y e , 英特尔公司已经 于 2017 年完成对 Mobile y e 的收购。 它的下一代 视觉 SoC 芯片 E y eQ5 ,如下图所示:

装备有 4 种异构 的全编程加速器,分别对专有算法进行优化,包括 计算机视觉、信号处理和机器学习等。 这种加速 器架构尝试为每一个计算任务适配最合适的计算 单元,硬件资源的多样性使应用程序能够节省计 算时间并提高计算效能。
此外,同样被英特尔公司收入麾下的 Nervana 也属于 ASIC 芯片供应商。 加入英特尔之 后,其计划推出的面向深度学习应用的定制芯片 NervanaEn g ine 比 CPU 在深度学习训练 上能多发挥 10 倍的性能。
以往,处理器都是作为标准平台提供给业界,软件工程师拼命优化编译器、代码、任务调 度等来达到更高的性能表现。 但是,这在现阶段已经无法满足产品快速上市的要求。 新的 自动驾驶计算平台,实际上是应算法和软件的需求而诞生的。 例如,为了更好地支持深度卷 积神经网络极大规模的矩阵运算,需要考虑如何使用二值化方法来降低对于硬件乘法器的 需求等。 而为了满足功能安全的需求,需要硬件级别的虚拟化,这就要求处理器架构设计方 面考虑多核、 VMM 、 设备 I / O 请求管理等。 最终能否提供同时满足经济性和性能要求的计 算平台,是自动驾驶汽车从样车转向量产车的关键因素之一。
本回答的主要内容来自图书《自动驾驶汽车平台技术基础》,清华大学出版社
 资源下载
资源下载