资源下载
资源下载








A型ALLGO
文件列表(压缩包大小 52.59M)
免费
概述
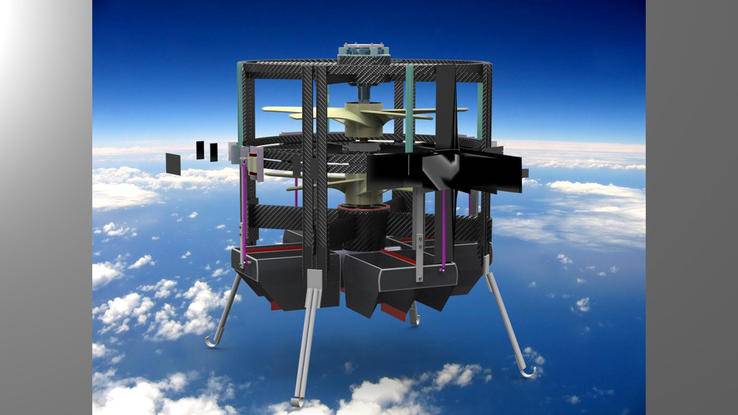
大概的概念: 具有四个等距腿的设计会增加在月球表面上移动的难度,并使龙门架不稳定。三脚设计也是如此。另一方面,在某些情况下,相对于有效负载而言,将这样的4脚框架放置在合适的位置更加困难。 因此,我使用了传统龙门架的形状来消除这些问题。
刚性: 充气时,气压要使弯曲的形状平坦,但是电缆将承受拉力,并且不允许弯曲的形状“展开”。这种预应力使该设计更加稳定。
机壳: 我试图将其设计得尽可能轻。它将电池和汽油箱固定在适当的位置,并将车架连接到悬架连杆。使用底盘上的孔和框架上对应的凸台(可以相互配合)来提供与框架的连接。
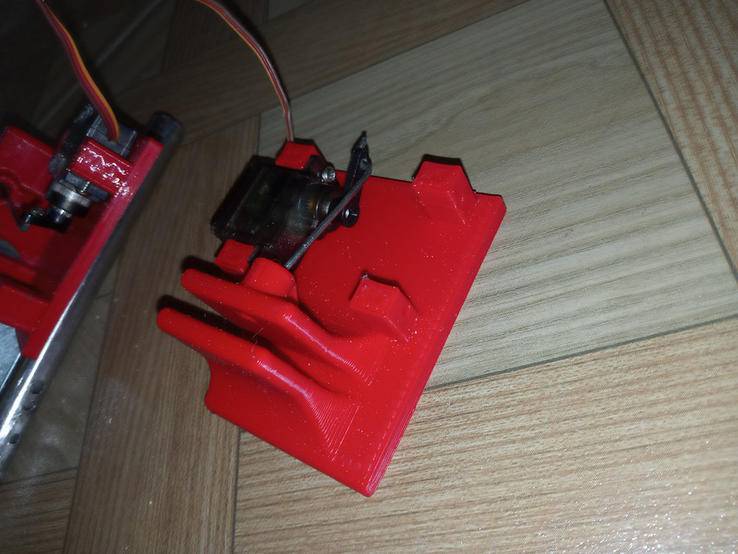
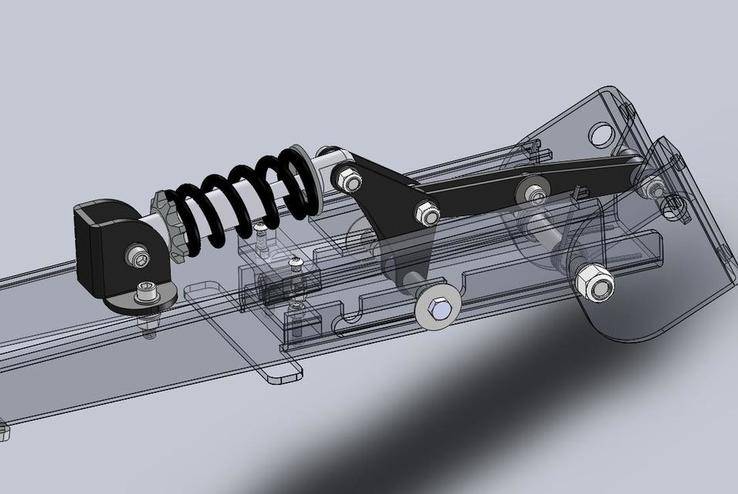
暂停: 我在这里使用了好奇号火星探测器的车轮: https://grabcad.com/library/wheel-nasa-jpl-curiosity-rover-wheel-1 所有4个车轮均具有330度转向能力。电机安装在轮毂上,无刷。可以使用步进电机控制将车轮连接到车身的臂。如果这些步进电机出现故障,则橡胶减震器将防止机械臂损坏底盘,同时使系统继续运行。
提升: 铝制“帽”连接到框架的顶部,该帽提供了用于安装提升机的位置,并将载荷分布在表面上以防止应力集中。盖子上的那些孔是为了减轻重量,还有4个孔用作将盖子安装在框架上的位置。 挂钩文件:https://grabcad.com/library/hook-5-tons-1 我更改了尺寸并增加了孔以减轻重量。
电源供应: 增加太阳能电池阵列将使龙门架更重,更笨重,但与尺寸相比,它们提供的功率却很少。相反,我们可以添加更多电池。电池可以通过连接到RTG(放射性同位素热电发生器)或任何其他电源进行充电。
Mack R文件:https://grabcad.com/library/mack-r-series-1
我将添加更多照片和说明。
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250