资源下载
资源下载




美国宇航局冠军
文件列表(压缩包大小 10.66M)
免费
概述
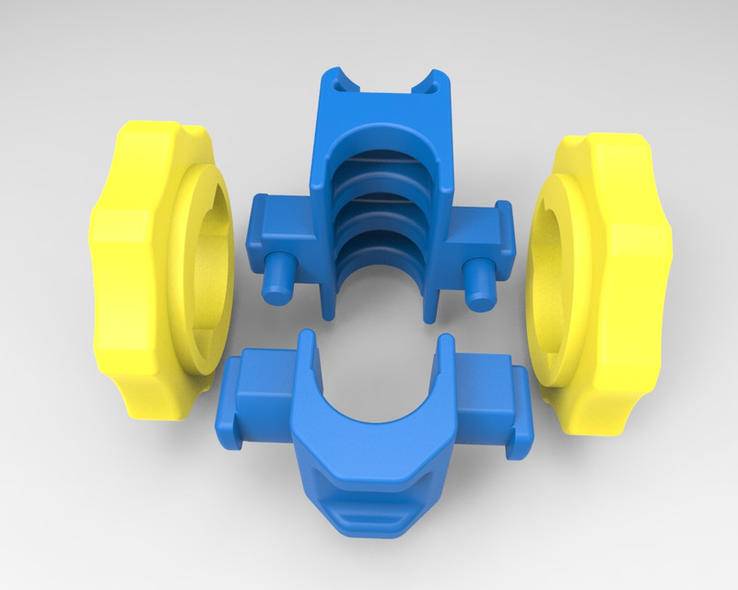
这种单一/通用零件设计将在扶手和设备之间形成刚性夹具组件。简单而低廉的“宇航员时间” 3D打印,具有最小的悬垂和一只手通过将两个相同的两半在扶手上一起滑动而进行装配的过程,而内置的坡度会楔入卡住的干扰中。
没有夹具的“沿扶手长度的滑动”-可以通过更改零件文件中的“ SlideDraft ...”角度来进一步改善(如果需要)。另外(和/或),在安装时,位于滑谷中央的凸形部分会在导轨和半夹之间增加额外的压力。 放置双头螺栓的垫圈时,会自动实现“无意断开”。没有“关于扶手的旋转”。
安装时,两个半夹的体积= 5.6 in ^ 3。
感谢Frederik Vollbrecht在扶手方面的贡献。
并感谢大家考虑我的设计。 亲切的问候, 伊斯万·托斯(Istvan Toth)
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(0)

0/250