资源下载
资源下载


【毕业设计】基于单片机的六足机器人控制系统设计

文件列表(压缩包大小 81.80M)
免费
概述
本资源包含论文、开题答辩PPT、硬件设计、软件设计等文件。
摘要
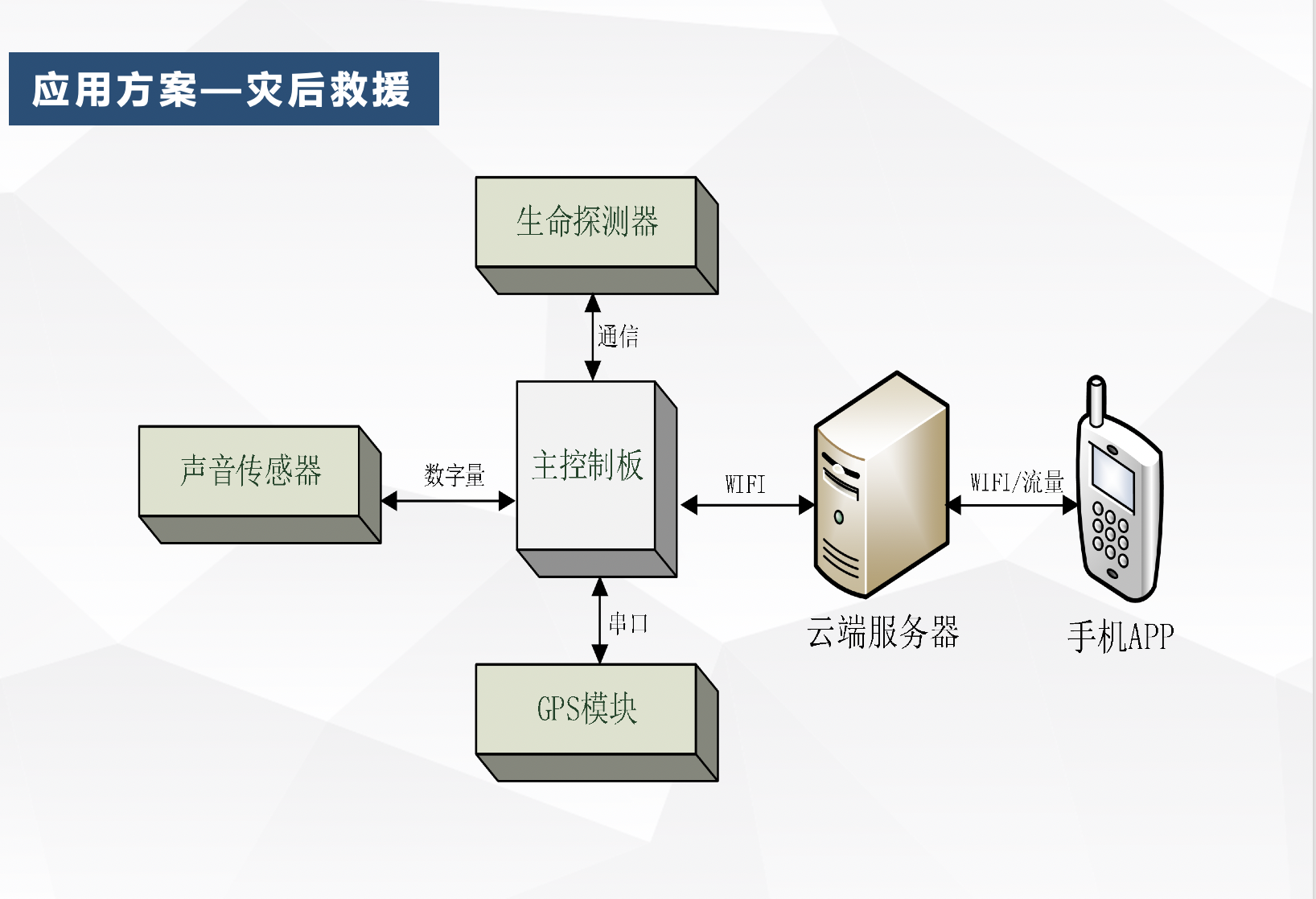
本设计主要是基于单片机的六足机器人控制系统设计,综合分析六足机器人的结构、步态和控制算法,结合云端服务器、WIFI技术、蓝牙技术、语音识别技术和手势识别技术进行多种控制模式的设计,并提出不同应用场景的不同构建方案。
设计思路
本系统的硬件设计分为主控板和舵机控制板两部分。主控板主要负责各种控制模式的数据处理和显示,舵机控制板主要负责舵机转动角度的控制,两板通过串口进行数据的交互。主控制板采用STM32F103VET6芯片,舵机控制板采用STM32F103R8T6芯片,两者都基于ARM的Cortex M3内核进行设计的。主控制板的硬件电路设计主要有启动电路、晶振电路、下载电路、复位电路、稳压电路以及各个模块接口电路。在Altium Designer16软件中进行原理图的绘制和PCB的绘制,打样后进行焊接并完成整体的测试。
本系统的上位机主要是手机APP,其开发环境是Android Studio,采用C#作为云端开放平台语言,JAVA语言作为移动客户端设计语言,通过JAVA语言的编写实现手机客户端的数据接收和发送,最终实现基于云端和蓝牙的控制系统上位机板块的设计。本系统下位机的软件设计是在Keil5编程环境下进行的,参考STM32F1的手册和各个模块的数据手册进行程序的编写,最终实现云端控制、蓝牙控制、语音控制和手势控制这四种控制系统设计。
目录
第一章 绪 论 1 1.1 设计的背景和意义 1.2 国外研究现状分析 1.3 国内研究现状分析 1.4 本文主要设计内容 第二章 系统方案设计 2.1 控制系统方案设计 2.1.1 远程控制方案设计 2.1.2 蓝牙控制方案设计 2.1.3 人机交互方案设计 2.2 应用场景方案设计 2.2.1 系统运用方案说明 2.2.2 崎岖地形探测方案 2.2.3 震后救灾搜寻方案 2.2.4 科研探险勘测方案 2.2.5 工厂巡检预警方案 第三章 硬件系统设计 3.1机械结构的分析 3.2主控芯片的分析 3.3数字舵机的选型 3.4 模块接口电路设计 3.4.1 WIFI模块接口电路设计 3.4.2 蓝牙模块接口电路设计 3.4.3 语音播放芯片外围电路设计 3.4.4 语音识别芯片外围电路设计 3.4.5 手势识别接口电路设计 3.5 远程视频模块介绍 3.6 各种传感器的说明 3.6.1 红外传感器 3.6.2 声音传感器 3.6.3 光敏传感器 3.6.4 超声波传感器 3.6.5 温湿度传感器 3.6.6 气体传感器 3.7 主控板电路设计 3.7.1 总体介绍 3.7.2 晶振电路 3.7.3 复位电路 3.7.4 降压电路 3.7.5 IIC接口电路 3.7.6 SPI接口电路 3.7.7 USART接口电路 3.8 PCB板设计及绘制 第四章 软件系统设计 4.1 软件开发平台介绍 4.2 系统整体设计框图 4.3 步态的设计和动作编写 4.4 远程控制程序设计 4.4.1 上位机的程序编写 4.4.2 下位机的程序编写 4.4.3 通信协议的说明 4.5 蓝牙控制APP设计 4.6 语音控制程序设计 4.7 手势控制程序设计 4.8 液晶显示界面设计 第五章 系统整体调试 5.1 远程云端控制调试 5.2 语音识别控制调试 5.3 手势识别控制调试 5.4 动作组整体调试 致 谢 参考文献 附 录
理工酷提示:
如果遇到文件不能下载或其他产品问题,请添加管理员微信:ligongku001,并备注:产品反馈

评论(3)

0/250
下载后的评价
感谢分享
2022-09-24
回复
下载后的评价
感谢分享
2023-02-05
回复
下载后的评价
感谢分享
2023-08-18
回复